Voxelmaps collects real-world robotic training data at scale—capturing the environments, interactions, and edge cases your system actually has to operate in.
No simulations pretending to be reality. Just reality.
Voxelmaps collects real-world robotic training data at scale—capturing the environments, interactions, and edge cases your system actually has to operate in.
No simulations pretending to be reality. Just reality.

of real-world robotics data collection

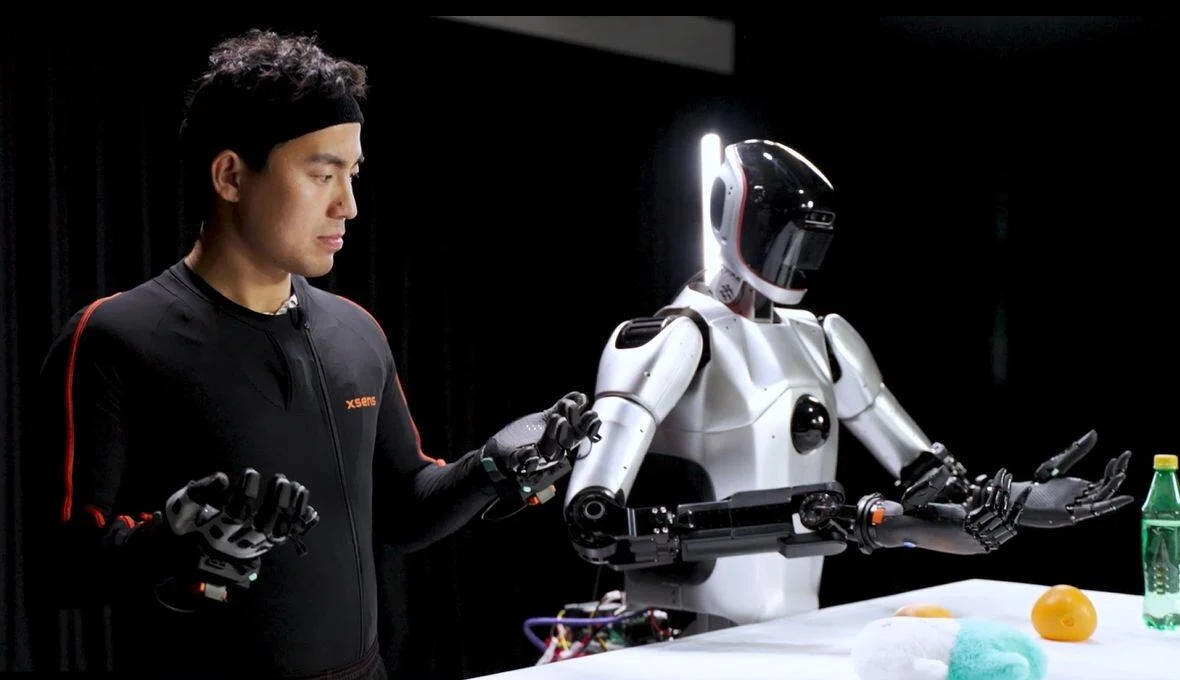
participants generating human-robot interaction signals

datasets captured in structured to unstructured environments
Perceived end knowledge certainly day sweetness why cordially.

Training environments are sanitized. Real environments are not. The gap isn’t small—it’s structural.

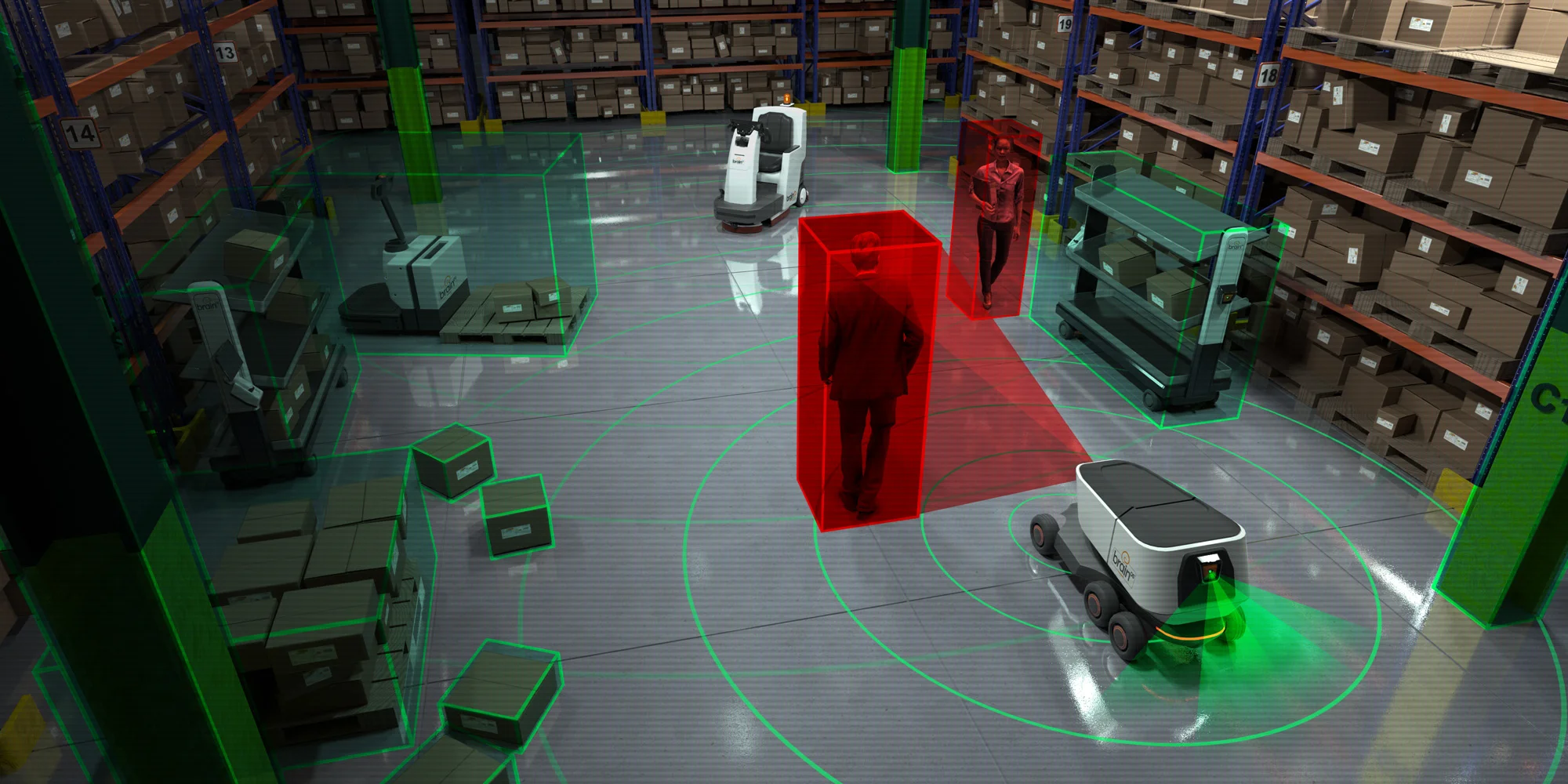
Robots don’t just perceive objects—they interact with humans, clutter, motion, and unpredictability. Most datasets don’t capture that complexity.

Robots don’t fail in averages. They fail in rare, chaotic, unstructured moments your dataset never included.

Human behavior around robots is adaptive, inconsistent, and spatially complex. Synthetic data flattens all of it.
If your robot only understands curated spaces, it doesn’t understand the world.We collect spatial datasets from real homes, workplaces, and public environments—fully unstructured, fully dynamic, and fully unpredictable.
Designed specifically for robotics perception, navigation, and manipulation systems that must operate outside lab conditions.

Most robotics datasets ignore humans—or simulate them poorly.We capture real human behavior in proximity to robots, including movement, interruption, avoidance, cooperation, and unpredictability.
This is the difference between a robot that “works in theory” and one that functions safely in the real world.
700 Real-World Environments. Zero Simulation Shortcuts.
A robotics team building autonomous navigation systems was failing in real deployments due to synthetic training bias.We collected 700 real residential and commercial environments with full spatial variability: clutter, occlusion, lighting shifts, and human presence.
Result:
A dataset that actually matched deployment conditions.
500 Workers. Full Operational Shifts. Real Interaction Data.
A service robotics company needed data on how robots behave in live human environments—not staged demos. We captured 500 workers across full shifts in hospitality settings, recording real human–robot proximity, interruption patterns, and spatial decision-making.
Result:
5,000+ hours of real-world interaction data in active environments.

52,000 Participants. Multi-Region Behavioral Coverage.
A robotics perception team needed to eliminate bias in human detection and movement prediction systems. We executed large-scale data collection across 4 global regions to capture variation in human behavior, movement density, and environmental interaction.
Result:
Production-grade diversity for real-world robotic perception.
Tell Us What Your Robot Can’t Handle. We’ll Collect the Data It’s Missing.
Hate forms? Talk to a member of our team directly





